
Modul plan plc Mekatronika PENS (Politeknik
Elektronika Negeri Surabaya)
Gambar
di atas merupakan bentuk dari plan yang di gunakan pada praktikum ini
Plan di
atas berfungsi untuk melakukan sortir benda/barang berdasarkan jenis warna dari
benda tersebut. Plan sendiri teriri dari tiga bagian utama. Pertama bagian
pendistribusian benda, kedua bagian CONVEYOR , dan yang ke tiga bagian sorting



Untuk
input output PLAN sesuai tabel beriut :

Tabel I/O Modul plan plc Mekatronika PENS
(Politeknik Elektronika Negeri Surabaya
Pemrograman bagian Distribusi barang/benda.

Pada bagian distribusi terdapat pendorong material yang akan
mendistribusikan material material yang ada. Pendorong ini harus di kondisikan
akan mulai bergerak maju jika ada benda,
dan mendorongnya hingga mencapai posisi maksimal. Jika sudah mencapai posisi
maksimal, pendorong akan bergerak mundur hingga posisi minimalnya.
Untuk
memulai proses pendistribusian plan perlu tombol start untuk memulai proses
distribusi. Dan akan berhenti jika benda yang akan di distribusikan habis.
Untuk mengetahui keadaan benda yang akan di distribusiakan telah habis atau
belum pada plan bagian distribusi terdapat sensor pendeteksi benda/material.
Untuk alamat input dari sensor deteksi benda/material bisa di lihat pada tabel
I/O dari plan. Pada tabel alamat sensor tersebut adalah I13.6.
Lebih mudahnya algoritma dari program adalah sebagai berikut :
- Tekan tombol start
- Jika mendeteksi material maka pendorong maju hingga posisi maksimal, jika tidak maka pendorong diam
- Jika pendorong telah mencapai posisi maksimal maka pendorong bergerak mundur hingga mencapai posisi minimal.
- Untuk mematikan seluruh proses tekan tombol stop.
Sebagaimana telah di jelaskan di
atas pada bagian distribusi ada sensor deteksi benda/material (I13.6), selain
ini terdapat Limit switch pada posisi maksimal
(I13.2 ( lihat pada tabe I/O)) dan posisi minimal(I13.1 ( lihat pada tabe I/O)). Ini di gunakan untuk mendeteksi
keadaan dari pendorong.
Sebagai tombol start digunakan
push button yang di pasang pada alamat I13.0, Sedang untuk tombol stop di
gunakan push button juga pada alamat I13.7. untuk mendorong material Q17.0
harus berlogic 1 untuk mundur Q17.0 berlogic 0. Untuk pendeteksi benda karena
berbentuk sensor Proximity maka aktif jika berlogic 0
dan nonaktif jika berlogic 1
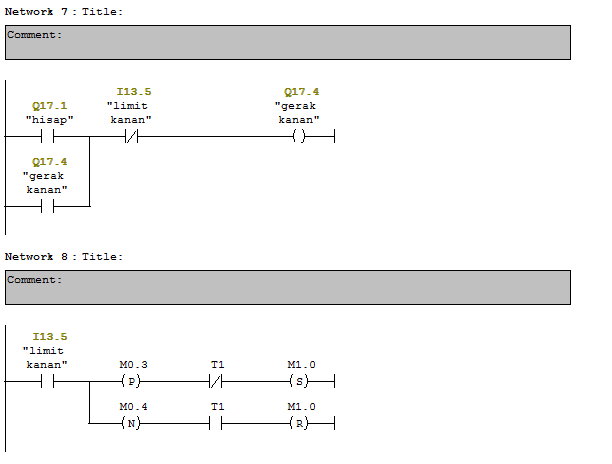
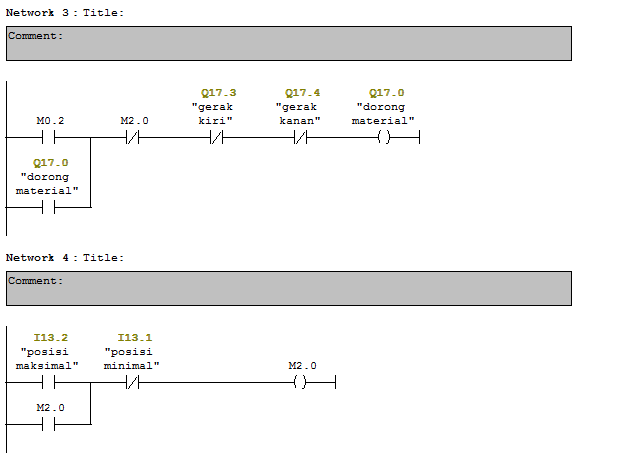
Dari algoritma di atas maka bentuk programnya sebagai berikut:

kemudian untuk program yang mampu mendeteksi benda banyak (material ditumpuk) tetapi tidak akan langsung di eksekusi apabila distribusi masih memproses suatu material, (tidak dapat mendistribusikan 2 benda secara bersamaan)

















0 komentar:
Posting Komentar